 HOME
HOME

Airbus Helicopters appear to be on something of a technology charge at the moment (no electrical power system pun intended). Their growing fleet of dedicated trials aircraft, both fixed and rotary wing, continue to break new ground showcasing the future trends that Airbus considers to be the gamechangers required for tomorrow's air platforms. Paul Kennard explores what Airbus is up to.
The RACER high speed demonstrator is in final assembly, sporting a freshly applied coat of paint and completing the installation and commissioning of over 700 data sensors for its Flight Test Instrumentation (FTI) system - vital to gathering the high-quality data that the company will need to mature the design for civil certification and, finally, production. At the time of writing most major pre-first flight activities have been signed off; the gearboxes for the main rotor and thrust compounding side propellers have been tested, and there remains hope that the necessary final checks and paperwork can be completed to permit a first flight by the end of the year.
In previous articles, I've covered the respective roles of the FlightLab and DisruptiveLab, both using lightweight single-engined machines to get ideas and concepts airborne much earlier in their development cycle than hitherto possible, certainly by a large OEM at least.
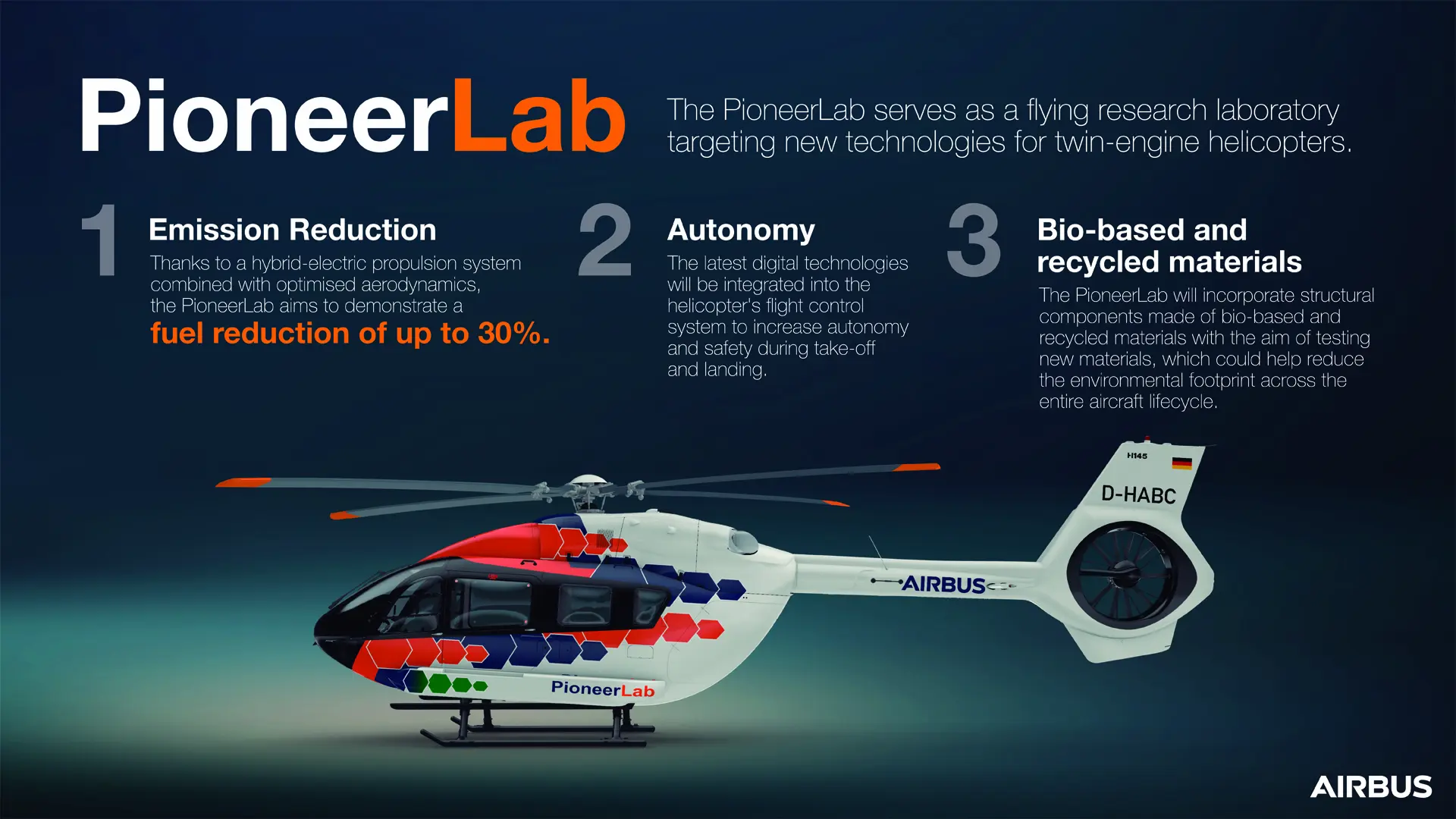
FlightLab employs a H130 helicopter as its baseline, whereas the DisruptiveLab is a purpose-built helicopter, used to demonstrate innovation in not just only bolt-on or carry-on technology, but also in the design, build and certification of major airframe components. Recently, Airbus have added an H145 helicopter to the Trials fleet. Dubbed PioneerLab, and part-funded by the German government, the larger twin-engine airframe will permit a broader range of experiments to be conducted. Having two engines, for example, would permit Airbus to conduct more in-depth test flying of electrified and hybrid powertrains. One of PioneerLab's stated aims is to demonstrate up to a 30% reduction in fuel burn over a standard H145, thanks to aerodynamic and propulsion enhancements over the current production aircraft. The safety provided by a second engine gives PioneerLab improved margins when conducting flight trials of new propulsion systems - important when developing Test Plans that involve establishing the effectiveness of electrical or hybrid drive systems by securing the 'conventional' engine. Having that second engine, throttled back, provides that instantly available power should there be an unexpected issue while testing the new tech, for example.
Convergence
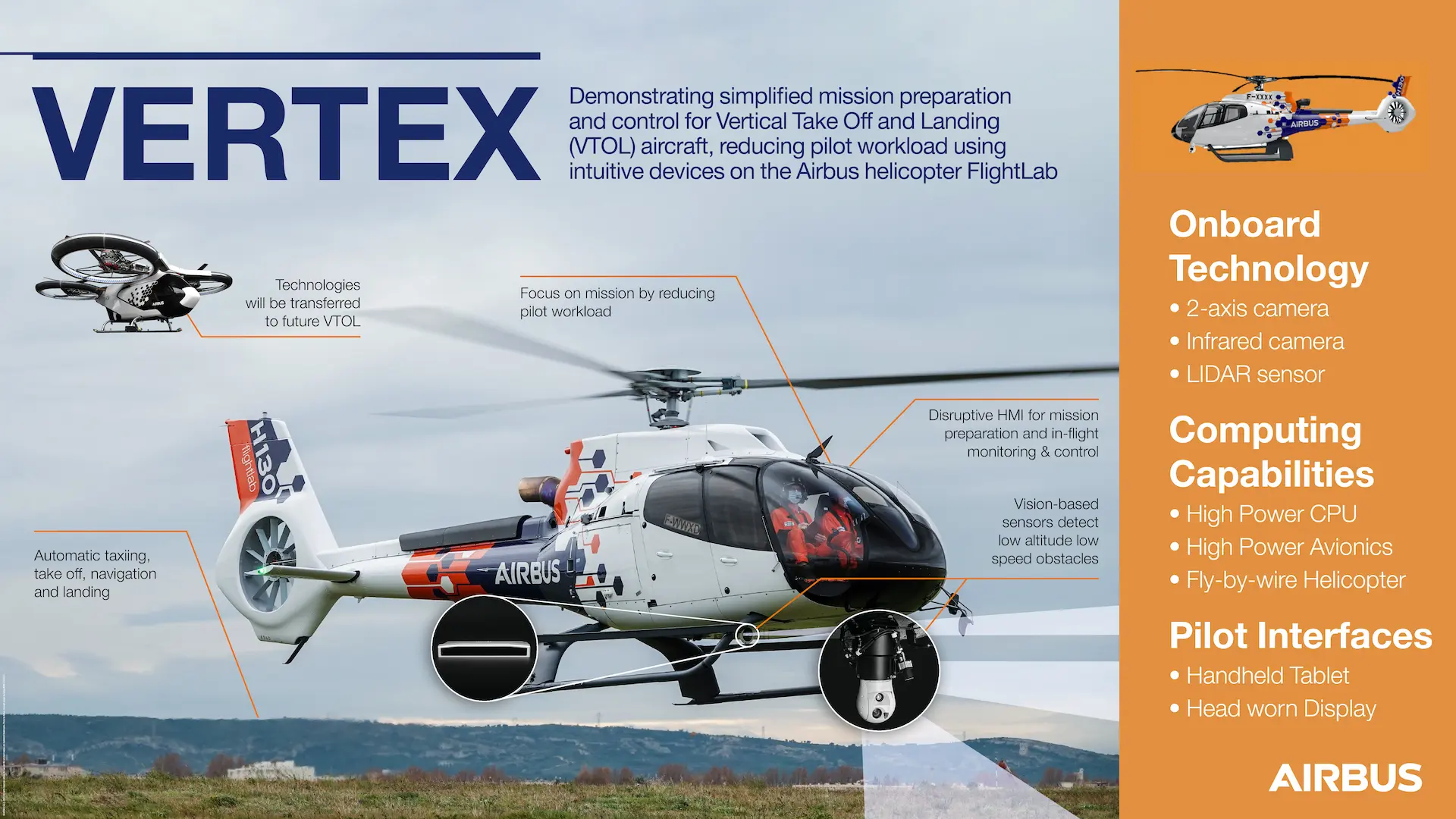
The latest piece of technology revealed by Airbus is codenamed 'Vertex’ (named after a point where two straight lines meet) and it is a product of Airbus' 'UpNext' innovation team. Vertex is a tablet-based Pilot Vehicle Interface (PVI) which enables a helicopter to be 'flown' without the need for conventional flight controls. Vertex is designed to showcase the potential for autonomous or semi-autonomous flight operations, with applicability across the full spectrum of vertical lift operations - including conventional manned helicopter tasks, fully autonomous uncrewed platform roles, and, with an eye to the near future, semi-autonomous cargo/passenger moves as part of Urban Air Mobility / Advanced Air Mobility (UAM/AAM) initiatives.
The recently completed trials, using the FlightLab, showcased Vertex's ability to permit a crew to take off, cruise along a pre-planned route, conduct a deceleration and final approach, and, eventually, land - all 'hands off'. For the purposes of conducting a safe flight test sortie, during the recent demonstration, naturally a crew were on hand to take control in the event of an anomaly, or unexpected obstruction / hazard emerged.
In a certified 'production' system, the crew need not be present - they could, theoretically, be located at a central monitoring and command location. This concept of 'remote monitored automation' is very much at the heart of many proposed UAM/AAM solutions - creating a 'systems of systems' with a central aviation 'Urban Traffic Management' (UTM) command and control overlay. There has been a tendency in this area to deem the 'U' in 'UTM' as 'unmanned’ and ascribe such a command and control system solely to the management of deconfliction between drones - perpetually seen (in countless attempts at securing investment capital) as filling the skies of future conurbations with the autonomous delivery of everything from blood and medicines to pizzas, office supplies and groceries.

In the Mix
Such as system, however, MUST also acknowledge the presence of manned platforms, whether 'in-cockpit' or remote monitored, into the urban airspace 'mix'. The vision of an 'Uber / FedEx of the skies' style service is perfectly valid, albeit the early affordability of such a capability will likely see such applications only being used, initially at least, on the smartphones of the well-heeled or their staff rather than the average punter. Regardless, even if only the privileged few are being whisked around in Jetson-style eVTOLs for the near to mid-term, any prospective UTM must accommodate them with due regard to Risk to Life - both air and ground - and let's be frank, a 4-5 person eVTOL will cause a lot more damage than a drone delivering your Deep Pan Pepperoni....
It is also important that such emerging technologies, both manned and unmanned, pay due cognisance to the legacy airspace users in and around major cities. These include existing 'urban air mobility' in the form of executive and VIP helicopters, often to be found ferrying the great and the good to downtown heliports such as Battersea in London, Pier 6 or West 30th Street in New York City, and the South Capitol Street heliport in Washington DC. Many of these heliports also support the tourist industry, with pleasure flights over historic landmarks, and it's important also not to forget that well established 'heli routes' exist in and around most major cities to facilitate helicopters and light aircraft to transit swiftly through the airspace in a co-ordinated manner. Finally, and often forgotten, are the unpredictable timings and flightpaths of law enforcement and emergency helicopters. While there will be 'hotspots' around their bases and key hospitals, the nature of their role gives them a city wide remit - along with the potential for News helicopters to follow their every move as they respond to high profile incidents.
A viable UTM must therefore provide a deconfliction backbone for manned aircraft as well as unmanned, autonomous and remote operated platforms that don’t have human 'look out' on board, and be able to cope with the dynamic tasking of emergency and police assets. For such a system to be robust and tolerably safe, it will require a complex communications architecture, with multiple layers of redundancy.

Vertex looks like it will have the potential to support such a UTM. Provided some form of standardisation is achieved, and/or appropriate 'middleware' and interfaces can be reliably defined, the flight planning aspects - both off board and in-flight - of Vertex could act as filing a UTM flight plan into the network. Once clearance is obtained, a developed and certified Vertex could then execute the flight plan as approved, and control the helicopter in terms of groundspeed and height to ensure any timing requirements at key reporting points are adhered to in order to maintain safe deconfliction. In broad terms it's little different to the combination of Flight plan, flow control and Flight Management System which controls and separates hundreds of airliners in Controlled Airspace every day. The key differences will be in terms of the sheer number of platforms wishing to file and fly via the UTM and the, by comparison, geographically small area involved. In short, a matter of simple traffic density; potentially hundreds of drones going about their work with dozens of eVTOLs and helicopters moving passengers. When you also consider the far greater 3rd party risk that a UTM system operating in a city will need to consider (pedestrians, ground transportation and inhabited buildings in high density and close proximity), the ad hoc nature of many of the tasks vice an airline schedule, and the likelihood of several customers wishing to route to major 'hubs' for work, sporting / entertainment events or onward transportation out of the area (conventional airports and rail/ferry termini) then the high integrity performance requirements for a resilient safe separation system are self-evident.
Challenge
No UTM is, nor will be, perfect. Even a complex, interleaved and resilient ecosystem will have 'blind spots' and be subject to error or component failure (or damage) - quite possibly at a rate that will inhibit approval at a high Design Assurance Level (DAL) as defined in DO-178. Vertex, however, ensures that the platform itself, and by extension the pilot / monitor, can fill in for those gaps or service interruptions. It enables the system to, perhaps, 'fail safe', and achieve a high level of certification by proving that a 'graceful degradation' of safety can be achieved, with clear 'off-ramps' if a failure threshold is reached.
Vertex is designed to exploit the latent capabilities of the host aircraft, for example, in the case of FlightLab the advanced autopilot. Additionally, if systems such as LIDAR are fitted, Vertex is capable of taking the feed from it and applying appropriate control commands to ensure that any obstruction that does not feature in the pre-flight database, for example in a pre-loaded Digital Vertical Obstruction File (DVOF), can be detected and safely avoided. Unlike a Digital Terrain Elevation Data (DTED) database, which as it reflects the underlying terrain is, literally, glacially slow to change (and will be at the highest level of accuracy - likely DTED Level 2 in most urban areas), a DVOF file is only as accurate as when the compiler hit 'save' and then promulgated the file electronically. For example, in the UK, the En-Route (ENR) 5.4 section of the UK Aeronautical Information Publication (AIP), which covers obstruction data, is updated, and issued (digitally) only every 28 days - in line with ICAO guidelines. Ever was it so, and it's why aviators of (ahem...) a certain age cut their teeth on updating paper maps before flight via both NOTAMs and local warnings. It also doesn't matter how good your DVOF update rate is if a 'pop up' hazard enters your flightpath. This could be a flock of birds, an 'off-UTM' drone operator, or even a tall cherry picker - all of which would prove a hazard to a manned or unmanned platform. By detecting these 'pop up' threats and being empowered to command the flight control system to avoid them, Vertex goes some way towards ensuring the safety of any UTM network - both at the platform and innocent 3rd party level.
Eagle Eyed
A clear opportunity for Airbus in this area would be to combine Vertex with Project EAGLE. Another product form Airbus' technology stable, EAGLE is currently a system of cameras fitted either to a gyro-stabilised pod or turret, or, perhaps, in time mounted conformally on the aircraft's skin, or positioned much like Missile Warning Systems to provide a '360' view around, and significantly below, the platform. EAGLE, which is an acronym of 'Eye for Autonomous Guidance and Landing Extension', is more than just an obstruction or hazard detection system on final approach, it's a system that is designed to be developed into an autonomous landing capability. EAGLE does this by taking the feed from its own camera system and, potentially, other sensors such as a LIDAR, and inputs them into an algorithm. The algorithm interfaces with the flight control system, in a similar manner to Vertex, and computes a safe, obstruction free, trajectory to the designated landing point. The problem with using EAGLE as a stand-alone system is the difficulty in certifying the algorithms for civil and commercial use. Therefore, as an interim stage at least, feeding the EAGLE data into Vertex, where it is combined with other inputs, could help to offset some of the concerns - and the EAGLE sensors would be of use throughout the flight rather than just on final approach and landing - and may well have applications outside UAM in, for example, rotorcraft operations in Degraded Visual Environments (DVE).
Vertex technology may well find its way onto the Airbus RACER high speed compound rotorcraft, which is rapidly approaching its first flight. Designed for speed and economy, and to be flown by current helicopter pilots with minimal retraining unlike, for example, the AW609 Tiltrotor, the RACER is aimed at the higher end of the UAM/AAM market - potentially replacing the Executive helicopter and, potentially, the regional turboprop (such as the King Air) over shorter sectors - especially when a 'point to point' service is desirable rather than having to rely on witching modes of transportation at out of town airports. Vertex, or a derivative, also seems likely to feature somewhere in the development of Airbus' family of electric VTOL (eVTOL) designs.
Vahana
Airbus has already flown its concept demonstrator for a single seat eVTOL aircraft, the Vahana (Sanskrit for 'vehicle'), which went from design study to test flight in less than three years - indicative of the tempo at which this market is developing. Capable of semi-autonomous operation, and with a range of approximately 50Km, the Vahana was never intended as a production vehicle, but as a showcase for rapid prototyping and test bed for some key technologies. With its flight test program complete in 2019, the two Vahana demonstrators were retired in favour of work on the CityAirbus demonstrator.
CityAirbus was a much larger design, conceptually able to carry four passengers at speeds up to 120Km/H - and it included some of the early versions of Vertex technology as part of its flight control and navigations systems, as well as Airbus' in-house Air Traffic Management (ATM) system. After a successful series of autonomous flights, the CityAirbus demonstrator program was finished in 2021 as Airbus switched attention to the CityAirbus NextGen design.
Similar in concept to the original CityAirbus, and scheduled to fly sometime in 2024, the NextGen eVTOL will be much closer to a certified production machine. Designed to comply with EASA's new SC-VTOL Enhanced Category, the NextGen is planned to carry a pilot and three passengers initially, with the option to replace the pilot with a fourth passenger once certification and the regulatory environment permit. Range and speed will be similar to the CityAirbus demonstrator and will doubtless act, alongside RACER, as something of a culminating point for much of the technology, such as Vertex, that Airbus are developing through their well-founded Test and Trials fleet.

With the likes of Vertex, EAGLE and other technologies being rapidly matured through the in-house flexibility of FlightLab, DisruptiveLab and now PioneerLab, Airbus is making rapid strides in the race for a slice of the future urban aerospace market. With the first flights expected this year of two pivotal designs, the RACER and CityAirbus NextGen, there are no signs that Airbus intends to either slow down or yield the field to their competition.